
Robotics 2015-2016

All 3 objectives in 1 video.
(Whole table length, over two gaps, carrying leggos)
https://www.youtube.com/watch?v=-wBHwtMw3-g
All 3 objectives with sensor
(Same as video one except stopping at a box then continuing)
https://youtu.be/fmsbArVX1Bs
Portfolio Guide Questions
1. In this assignment we built a robot to go straight across 3 tables over two 2 inch gaps. While also carrying a cup of legos. After accomplishing this we included a sensor so the robot would automatically stop at a object in its path then continue moving when the object is no longer in its way.
2. What are your input factors? (What do you need to know or do before you can begin?) Include the research you did.
Before building this robot you need to have plan of how the robot should be built in order to do what it needs to. You also need Labview to change all the functions on the robot.
3. Describe the process in detail. Explain the steps you followed in order to complete the project.
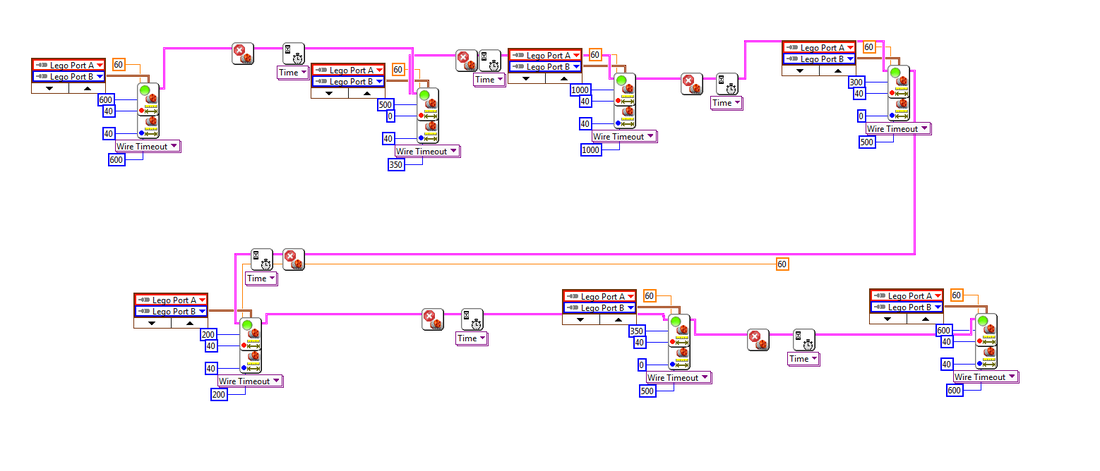
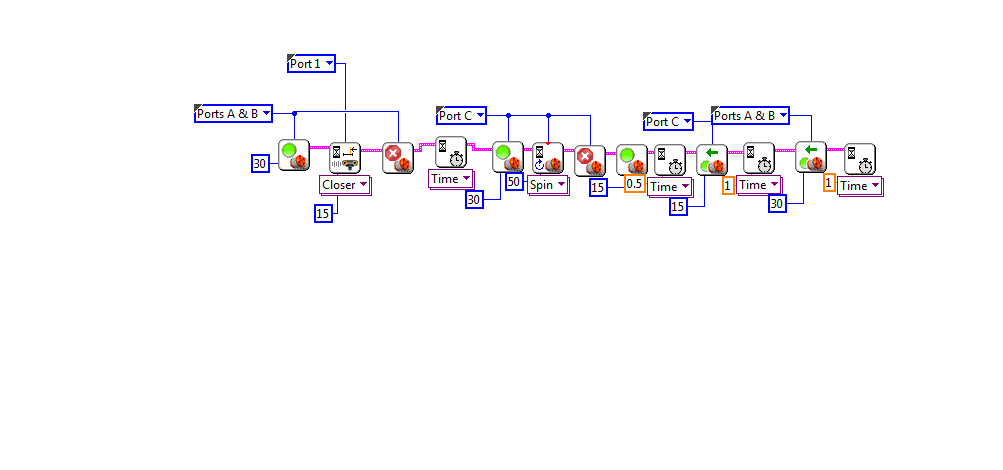
The first step was making a diagram that allowed the robot to go straight at the speed you wanted. We then made a wire loop with a sensor that made it stop when it sensed something in its path. We also had to calculate the circumference of the wheel and the distance of the table. All of this had to be converted to comply with the robot.
4. Describe the final output / product in detail: (what are we looking at?)
The final product was the robot being able to do all the commands you wanted it to do. It held the cup of legos in a craddle on the back of the robot at a speed of 100 across the entire distance of the 3 tables while stopping when an object was in the way at the end.
5. Describe feedback you received during the project (suggestions, comments, etc). From peers, instructor ect.. How did you use this feedback to correct issues with your project?
During this project with did not receive any constructive criticism. Our robot passed each test with no issues. Nothing needed to change each time since it was built to do everything it needed to. The only adjusting we had to do was change the distance so it stopped at the end without the sensor.
6. What did you learn during the assignment such as tools, skills, design concepts, software, hardware, etc? ,
I learned a lot about using the LabView software and the concept of how the robot works. It was very easy to use once i got the hang of it.
7. If you were to do the project again, what would you do differently and why? Provide reasons and examples
I would not do much of anything differently to my robot or program. If anything i would bring the height of the robot up a little bit so it can clear the gaps a little more. The reason for this is because the bigger the table gap was the more it bottomed out, although i dont need to go over any gaps larger than 2 inches.
Powerpoint
Line Follower:
https://docs.google.com/a/sbregional.org/presentation/d/11bcFOz8EK52qcsLn38sK2w1b9hC2WfNQ4v9w8ljZc1I/edit?usp=sharing
Tug O War:
https://docs.google.com/a/sbregional.org/presentation/d/1iuXT4SXuYMmco8Ayql8ombyhYapdZAni0WMqI_zQh_k/edit?usp=sharing
https://docs.google.com/a/sbregional.org/presentation/d/11bcFOz8EK52qcsLn38sK2w1b9hC2WfNQ4v9w8ljZc1I/edit?usp=sharing
Tug O War:
https://docs.google.com/a/sbregional.org/presentation/d/1iuXT4SXuYMmco8Ayql8ombyhYapdZAni0WMqI_zQh_k/edit?usp=sharing
Line Follower and Race (2 Objectives, 1 video)
Tug o war
Cleaned Kit

War Bot (Cam & Ethan is First video)
Maze bot
Cleaned Kit

Unit 1 Questions
















Unit 2 Questions























Maze Bot
Maze lab view
Maze bot with Walls
Maze Wall Bot LAbview

Grab Bot
Grab Bot Lab View
Test
Term 3 Kit Cleaning

Line Follower Bot

Bot was taken apart; unable to take picture
Term 4 Kit CLEaning

KIT WAS UNTOUCHED SINCE 3RD TERM. SAME IMAGE
Mouse trap
final exam
| final_exam_2016_r.docx |
